Investigation of physics-guided neural network models for dynamic systems
Masterthesis, Bachelorthesis, Advanced Design Project (ADP)
In recent years, surrogate modeling and dynamic systems identification using machine learning (ML) has gained attention due to the manifold potential applications in digital twins of engineering products, processes, and systems. Generally, ML approaches such as neural networks (NNs) offer a high degree of flexibility, which is useful to describe physical phenomena where the underlying physical laws are completely or partially unknown. However, since regression, time-stepper and recurrent NNs exhibit poor extrapolation and stability of solutions, various physics-guided neural network formulations for dynamic systems have already been proposed.
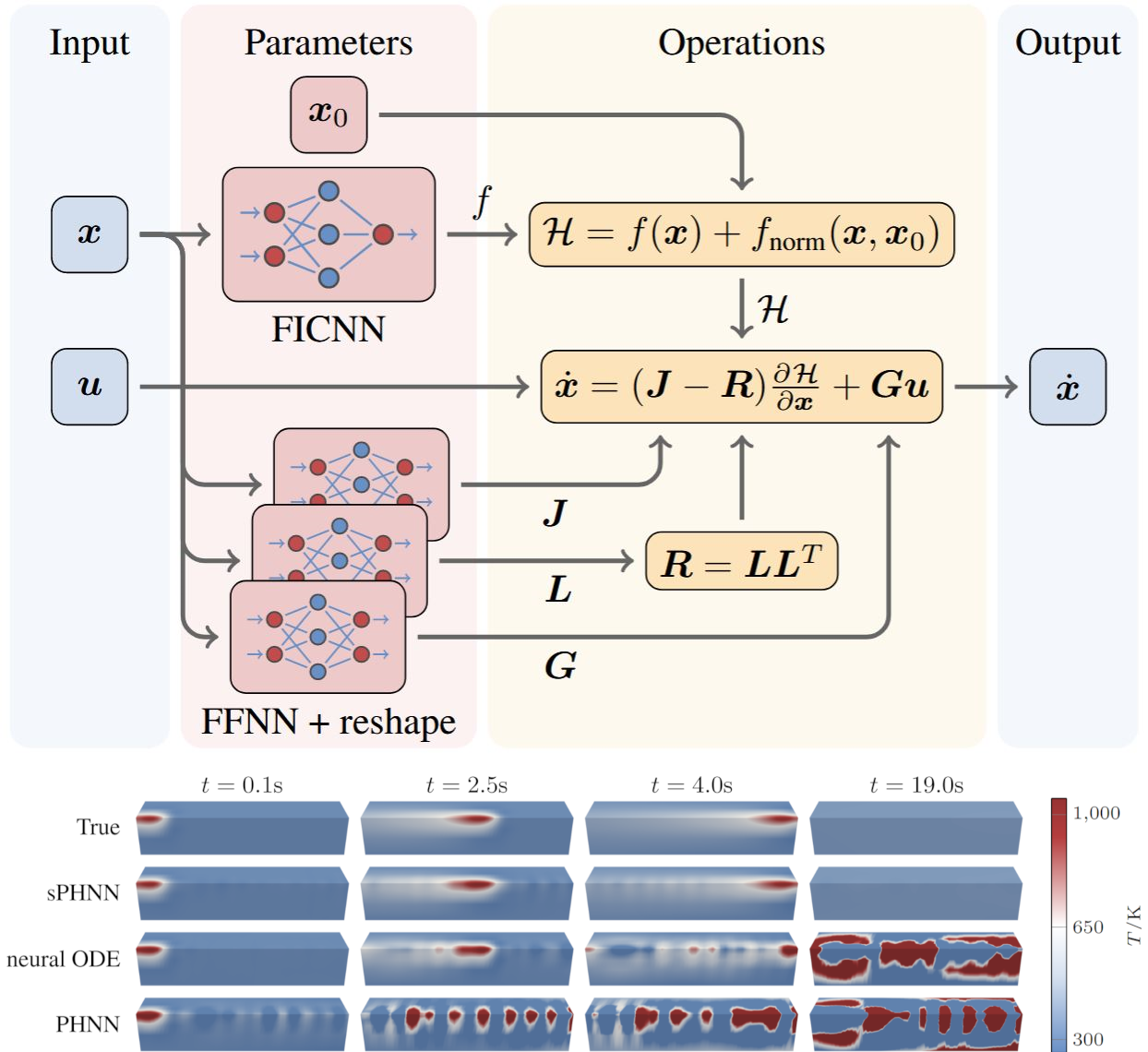
These approaches incorporate known physical laws or inductive biases into NNs and preserve the ordinary differential equation (ODE) character of the models. Neural ODEs exploit the ability of neural networks to approximate arbitrary continuous functions to describe and learn the dynamic evolution of a state variable. Further approaches such as Hamiltonian and Lagrangian NNs aim to include physical model knowledge such as energy conservation in machine-learned dynamics. Frameworks such as port-Hamiltonian dynamics and GENERIC can also introduce energy dissipation in a thermodynamcially consistent fashion.
Potential topics
- Application of physics-guided neural networks to surrogate modeling of complex, multiphysical simulations, e.g., in the context of electric machines or additive manufacturing processes
- Investigation of the stability implications of different dynamic system formulations based on physics-guided neural networks by researching, implementing, and comparing existing formulations
- Development of physics-guided NNs for the modeling of humanoid robots and of robot control algorithms based on such dynamic models